
Ende August 2016: Ich bin auf einem Flug von Korfu in Griechenland nach Split in Kroatien. Wegen das an diesem Tag sehr starken Dunstes sehen wir während des Sinkflugs aus FL110 auch in 5000 Fuß kaum die kroatischen Inseln Hvar und Brac. Nur schemenhaft wie große dunkel Schatten erscheinen die beiden großen Inseln unter uns im glitzernden Meer. Einen Horizont sieht man auch nicht, und die Küstengebirge nahe des Airports sind nur schemenhaft zu erkennen.
Aus der ATIS weiß ich, dass die Landebahn 05 in Betrieb ist, und ich habe den Anflug auch schon gebrieft als ich vom Radarlotsen den ersten Vektor bekomme. Zwei Funksprüche später bekomme ich das Intercept Heading für den Localizer und “2500 Fuß” – was mich stutzig macht. Waren es nicht 2800? Ein Blick auf das MFD auf dem bereits die Approach Chat dargestellt wird und mir ist klar, was der Lotse vor hat, er will mich direkt in den Endanflug bringen, innerhalb des Final Approach Fix. So etwas machen Lotsen manchmal wenn VMC-Bedingungen herrschen, viel Verkehr ist und sie kleine Maschinen schnell auf den Boden bringen wollen.
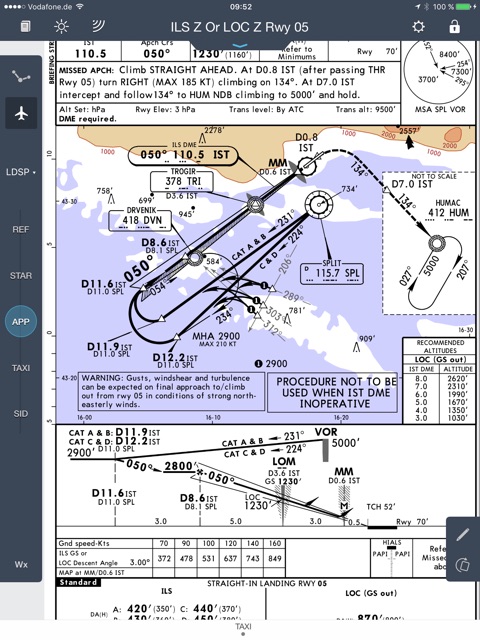
Von viel Verkehr kann allerdings keine Rede sein, und von “VMC” eigentlich auch nicht. Ich bin zwar sicher, dass ich den Flughafen sehen werde wenn ich etwas näher bin, aber schon aus Trainingsgründen (das nächste Mal bin ich vielleicht bei schlechtem Wetter in Wolken) rufe ich Radar und requeste einen längeren Endanflug und die veröffentlichte Höhe. “Roger, Golf Romeo Charlie”, der Mann klingt leicht genervt, “then (!) fly 360 and descend 2800”.

Eine Minute später (leider zeigt das Flugzeugsymbol auf dem MFD keinen Vektor) wird mir aber klar, dass auch dieser Kurs sehr knapp bemessen ist und mich direkt zum Final Approach Fix über der kleinen Insel Drvenik bringen wird. Da die Sonne jetzt im Queranflug hinter uns steht ist die Sicht etwas besser, ich kann die Küstenlinie deutlich sehen, und auch den Flughafen erahne ich schon. Ein letzter Check: Höhe 2800, Kurs 360, Final Course im EHSI ist eingestellt, die richtige ILS-Frequenz ist eingestellt, die Datenquelle am PFD zeigt “VLOC” und die Statuszeile des MFD zeigt für den Autopiloten “HDG und NAV” an. Der Autopilot wird also den Steuerkurs so lange fliegen bis der Localizer empfangen wird und dann auf diesen eindrehen, und anschließend den Glide Slope intercepten, was natürlich in diesem Fall, da wir direkt am FAF ankommen werden beinahe zeitgleich geschehen muss.
Von den RNAV/GPS-Approaches nach “LPV”, die ich am liebsten fliege, weiß ich, dass man auf dem Final Course mindestens zwei Meilen geradeaus fliegen muss, damit die Avionik den virtuellen “Localizer” und “Glide Slope” erfliegt. Vor nicht allzu langer Zeit war ich auf einem Anflug auf das tschechische Brünn und bekam ebenso einen Vektor zum FAF, woraufhin die Maschine geradeaus durch den Anflug flog und die Avionik keine Anstalten machte, dem Approach zu folgen.
Zurück nach Split: Als wir Drvenik erreichen dreht die Maschine sauber auf den Endanflugkurs ein, – aber den Glide Slope, obwohl in blau auf dem PFD aktiv (auch die Anzeige des GS auf dem PFD ist da), erfliegt sie nicht. In dem Moment, in dem wir das FAF überquert haben, war die GS-Nadel zentriert, aber jetzt fällt sie schnell nach unten weg und fünf Sekunden später ist mir klar, dass das “nichts wird”. Ich tippe am Autopiloten VS, drehe eine Sinkrate von -650 rein und erfliege so den GS von oben”. Als mir das zu lange dauert, die Bahn habe ich jetzt in Sicht, schalte ich den Autopiloten aus und sinke noch etwas stärker, um wenigstens nach der PAPI-Anzeige auf den richtigen Anflugwinkel zu kommen. Alles kein Problem.
Was mir aber zu denken gibt ist, dass ich zum zweiten Mal innerhalb von ein paar Monaten in diese Falle gerasselt bin. Und ein paar Tage zuvor bin ich in Korfu, auch auf Anweisung des Lotsen, mit fast 200 KTAS von oben in den VOR-Approach geflogen – was bei VMC kein Problem war, ich aber in IMC verweigert hätte.
Tatsächlich ist es eben auch beim ILS so, dass man auf dem Localizer stabilisiert sein muss, damit der Autopilot bei einem “Coupled Approach” den Glide Slope sauber erfliegen kann. In Zukunft werde ich deshalb noch mehr darauf achten, dass Lotsen mich auf einen langen Endanflug bringen.
Typischerweise ist es ja bei den modernen GPS-ILS-Navigatoren ja so, dass man den ILS-Approach lädt, diesen aber bis zum Erreichen des LOC nach Satellitennavigation fliegt. Sind die Bedingungen dafür dann erfüllt, schalten GNS, GTN und auch IFD dann (wenn in den Settings aktiviert!) automatisch auf Funknavigation um. Hat man Sorge, dass das nicht klappt, etwa weil man außerhalb der “Box” ist, kann man auch manuell umschalten.
So habe ich das auch im Anflug auf Split gemacht und der Navigator erflog im Zusammenspiel mit dem Autopiloten den Localizer. Interessanterweise aber wurde der Glideslope nicht aktiviert. Warum das – im VLOC-Betrieb – nicht geschah habe ich immer noch nicht verstanden.